

【導讀】飛行時間(ToF)相機憑借更小的外形尺寸、更寬的動態(tài)感測范圍,以及在多種環(huán)境下工作的能力,成為首選的深度傳感方法。雖然ToF技術已在科學和軍事領域應用多年,但隨著21世紀初圖像傳感技術的進步,才得到更加普遍的應用。性能的變革意味著,包括 ADI ToF 技術在內(nèi)的探測技術,已被應用到智能手機、消費電子和游戲設備中,未來將不僅限于消費市場。隨著技術的進一步成熟,將有機會利用主流制造工藝從設計、制造和貨物運輸?shù)榷喾矫鎭硖岣呦到y(tǒng)效率。
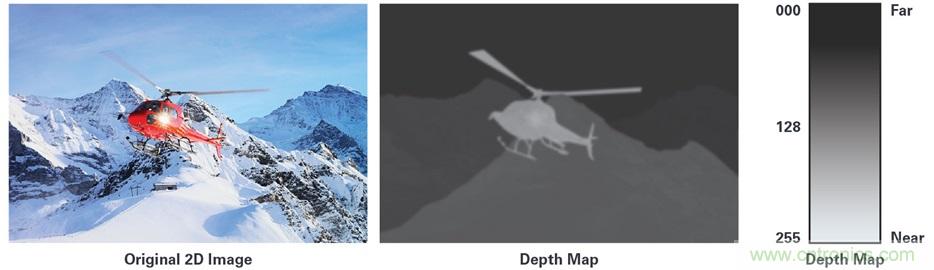
圖1. 飛行時間(ToF):一項檢測到物體的距離的技術。
物流、質(zhì)檢、導航、機器人、人臉識別、安保、監(jiān)控、安全、醫(yī)療健康和駕駛員監(jiān)控,所有這些應用都有機會使用3D深度傳感ToF技術,從而來解決許多傳統(tǒng)2D技術無能為力的問題。高分辨率深度數(shù)據(jù)與強大的分類算法以及AI相結(jié)合,將會解鎖許多新的應用方向。
本文將探討ToF深度傳感的基本原理和兩種主要的方法,并與其他常用的深度測量技術進行比較。然后,詳細介紹ADI公司的3D 深度傳感ToF技術的核心—— ADDI9036 模擬前端,這是一個完整的ToF信號處理器件,集成了深度處理器,將來自VGA CCD 傳感器的原始圖像數(shù)據(jù)處理成深度/像素數(shù)據(jù)。我們還將討論ADI如何通過硬件合作伙伴生態(tài)系統(tǒng),將這項技術擴展到我們廣闊的市場客戶群。
基本的工作原理
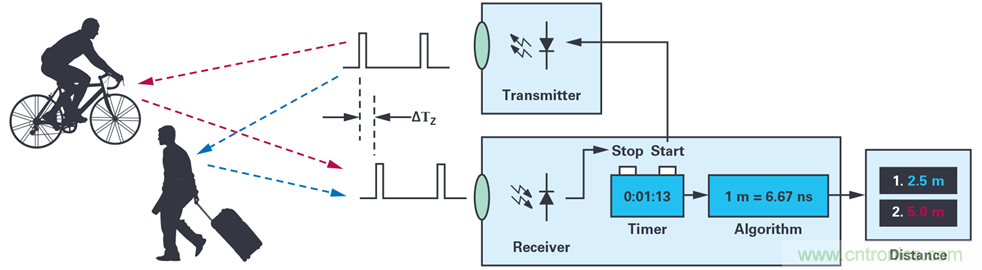
圖2. 簡單的飛行時間測量示意圖。
ToF相機通過使用調(diào)制光源(例如激光或LED)主動照亮物體,并用對激光波長敏感的圖像傳感器捕捉反射光,以此測量出目標距離(圖2)。傳感器可以測量出發(fā)射出的激光信號經(jīng)目標反射,回到相機的時間延遲?T。該延遲與相機到目標物體間的兩倍距離(往返)成正比;因此,深度可以估算為:
其中 c表示光速。ToF相機的主要工作是估算發(fā)射光信號和反射光信號之間的延遲。
目前存在多種不同的測量?T的方法,其中兩種最為常用:連續(xù)波(CW)方法和脈沖方法。
連續(xù)波方法
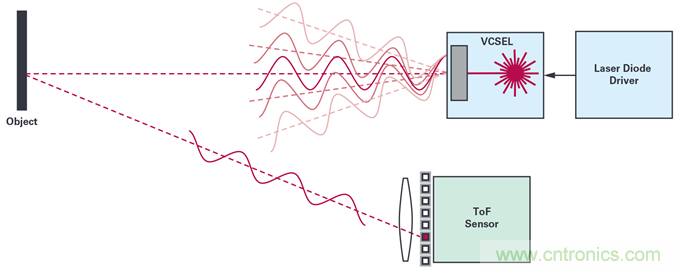
圖3. 連續(xù)波ToF系統(tǒng)圖解
連續(xù)波方法采用周期調(diào)制信號進行主動發(fā)光(圖3),然后對接收到的信號進行零差解調(diào),以測量反射光的相移。
例如,當發(fā)射信號使用正弦調(diào)制是,可以表示為如下公式:
其中
● As表示信號的幅度
● Bs 表示信號的偏置量
● fmod 表示調(diào)制頻率, fmod – 1/Tmod 其中 Tmod 表示調(diào)制周期。
接收信號 r(t)是反射信號經(jīng)過延遲和衰減得到的:
0 ≤ α < 1,α是衰減系數(shù),其值取決于目標距離以及表面反射率,?T表示返回信號的延遲時間。
連續(xù)波飛行時間傳感器通過按照相同的頻率s(t) 對接收信號 r(t))和解調(diào)信號 g(t) 之間的相關函數(shù)進行采樣,以此測量每個像素的距離。在理想情況下,解調(diào)信號也是一個正弦波:
像素執(zhí)行的操作為相關運算:
當發(fā)射信號和解調(diào)信號都是正弦波時,相關值作為延遲τ 的函數(shù)應用到解調(diào)信號中:
之后,如公式3所示,在每個四分之一周期內(nèi),對相關函數(shù) c(τ)采樣(通過90°步進改變發(fā)射光信號相位)。對于發(fā)射信號和解調(diào)信號之間的相位偏置Φ=2πfmodΔT,可以使用公式7估算:
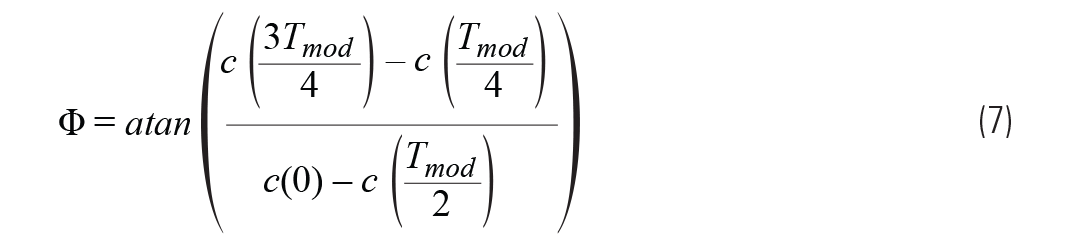
深度則與相移成正比:
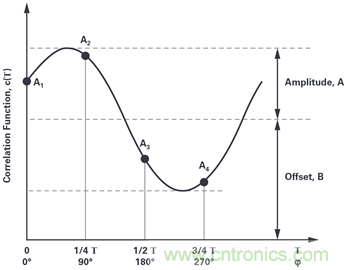
圖4. 相關函數(shù)采樣過程圖解。
脈沖方法
在脈沖方法中,光源發(fā)出一系列N 個激光短脈沖,這些脈沖被反射回帶有電子快門的傳感器,該傳感器能夠在一系列短時間窗口中進行曝光。圖5中的三個快門窗口或脈沖被用于捕獲反射 光脈沖。其中BG窗口捕獲環(huán)境光,計算深度時環(huán)境光強度會被減掉。
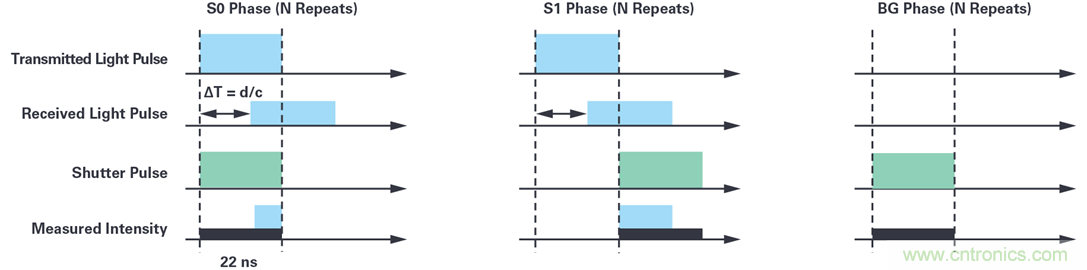
圖5. 快門窗口捕捉反射光的示意圖。
根據(jù)不同快門曝光測得的光強值,可以按照以下公式估算得出ToF ?T:
在公式1中,使用公式9中的表達式替代?T,得出公式10,由此計算距離:
需要注意的是,這些公式是建立在假設脈沖是完美的矩形脈沖的基礎上的,考慮到硬件的局限性,這是不可能實現(xiàn)的。此外,在實際情況下,需要對幾百甚至幾千個激光脈沖進行積分,才能獲得測量所需的足夠的信噪比(SNR)。
連續(xù)波和脈沖ToF技術系統(tǒng)的優(yōu)缺點
相對于應用用例,兩種ToF方法都有各自的優(yōu)缺點。需要考慮的問題包括:測量距離、使用系統(tǒng)的環(huán)境、精度要求、熱/功耗限制、外形大小以及電源問題。值得注意的是,目前已在市場上得到廣泛應用的絕大多數(shù)連續(xù)波ToF系統(tǒng)都使用CMOS傳感器,脈沖ToF系統(tǒng)則使用非CMOS傳感器(主要是CCD)。因此,以下列出的優(yōu)點/缺點都是基于這些假設:
連續(xù)波系統(tǒng)的優(yōu)點
● 對于對精度要求不高的應用,連續(xù)波系統(tǒng)可能比脈沖系統(tǒng)更容易實現(xiàn),因為它不要求激光脈沖非常短,也不需要具有超快的上升/下降沿,當然在實際中很難復制完美的正弦波。但是,如果精度要求變得更嚴格,那么將需要更高頻率的調(diào)制信號,這實際上很難實現(xiàn)。
● 由于激光信號具有周期性,所以連續(xù)波系統(tǒng)測量中的任何相位測量每隔2π會重復一次,意味著會產(chǎn)生一個混疊距離。對于只有一個調(diào)制頻率的系統(tǒng),混疊距離也是最大可測距離。為了應對這個限制,可以使用多個調(diào)制頻率來執(zhí)行相位展開,其中,如果兩個(或多個)具有不同調(diào)制頻率的相位測量值與估算的距離一致,就可以確定與物體之間的真實距離。這種多重調(diào)制頻率方案也可以用于減少多路徑誤差,多路徑誤差是由于一個物體的反射光擊中另一個物體(或在鏡頭內(nèi)部反射),然后返回到傳感器時會導致的測量誤差。
● 在所有CMOS成像器系統(tǒng)中,可以使用標準電源軌(+5 V、+3.3 V、+1.2 V),而CCD可能需要使用更高的負極(–9 V)和正極(+14 V)電源軌道。
● 根據(jù)它們的配置,CMOS ToF成像器往往具有更大的靈活性和更快的讀出速度,因此可以實現(xiàn)感興趣區(qū)域(RoI)輸出等功能。
● 連續(xù)波ToF系統(tǒng)的溫度校準可能比脈沖ToF系統(tǒng)更容易。隨著系統(tǒng)溫度升高,解調(diào)信號和激光信號會因為溫度變化彼此偏移,但這種偏移只會影響測量距離,在整個距離范圍內(nèi)始終存在偏置誤差,而深度線性度則基本保持穩(wěn)定。
連續(xù)波系統(tǒng)的缺點:
● 雖然與其他傳感器相比,CMOS傳感器具有更高的輸出數(shù)據(jù)速率,但連續(xù)波傳感器需要在多個調(diào)制頻率下獲得4個相關函數(shù)樣本,并使用多幀處理來計算深度。較長的曝光時間可能會限制系統(tǒng)的整體幀率,或?qū)е逻\動模糊,因此只能在有限類型的應用中使用。這種更高的處理復雜性可能需要用到外部應用處理器,而這可能超出了應用的需求。
● 對于更遠的測量距離或者更強環(huán)境光的場景,更高的連續(xù)光功率(與脈沖ToF系統(tǒng)相比)則十分必要;而這種高強度的連續(xù)光信號則可能導致散熱和可靠性的新問題。
脈沖ToF技術系統(tǒng)的優(yōu)點:
● 脈沖ToF技術系統(tǒng)通常依賴于在很短的時間窗口內(nèi)發(fā)出高能光脈沖。它具有下列優(yōu)點:
(1)更加便于設計魯棒性強的系統(tǒng),因此更適用于戶外。
(2)曝光時間越短,運動模糊的效應越小。
● 脈沖ToF系統(tǒng)中的信號占空比通常比同等水平的連續(xù)波系統(tǒng)要低得多,因此具有以下優(yōu)點:
(1)對于長期工作的應用,可以降低系統(tǒng)的總功耗。
(2)通過將脈沖群放置在與其他系統(tǒng)不同的幀位置,從而避免來自其他脈沖ToF系統(tǒng)的干擾。這可以通過協(xié)調(diào)各種系統(tǒng)在一幀中為激光脈沖選擇不同的位置,或者使用外部光電探測器來確定其他系統(tǒng)脈沖的位置來實現(xiàn)。另一種方法是動態(tài)隨機排列脈沖群的位置,這樣就無需協(xié)調(diào)各個系統(tǒng)之間的時序,但這種方法無法完全消除干擾。
● 由于脈沖時序和寬度不需要一樣,所以可以采用不同的時序方案,支持實現(xiàn)更寬的動態(tài)范圍和自動曝光等功能。
脈沖ToF技術系統(tǒng)的缺點:
● 由于發(fā)射光脈沖的脈寬和快門的脈寬需要保持相同,所以系統(tǒng)的時序控制需要非常精確,根據(jù)應用需要,可能需要達到皮秒級精度。
● 為了達到最大效率,激光脈沖寬度必須非常短,但同時必須具有極高的功率。因此,激光驅(qū)動器需要實現(xiàn)非??斓纳仙?下降沿(< 1ns)。
● 與連續(xù)波系統(tǒng)相比,其溫度校準過程可能更為復雜,因為溫度的變化會影響單個脈沖寬度,不僅影響偏置和增益,還會影響其線性度。
● 如前所述,大多數(shù)脈沖系統(tǒng)都不使用CMOS傳感器。例如:
(1)脈沖ToF系統(tǒng)幾乎總是需要使用外部模擬前端來數(shù)字化和輸出深度數(shù)據(jù)(盡管連續(xù)波系統(tǒng)也可能需要使用外部處理器,但這取決于后端處理的復雜度)。
(2)該系統(tǒng)的配置(特別是ToF傳感器的電源要求)需要使用更多的組件和電源軌。
其他深度傳感技術
熟悉其他深度傳感技術對理解不同方案的優(yōu)缺點非常有幫助;如前所述,根據(jù)用例和應用要求,所有深度傳感系統(tǒng)各有優(yōu)缺點。
立體視覺
要使用立體視覺進行深度測量,需要用到多個相機,彼此之間相隔一定距離(圖6)。就像人眼一樣,會在空間中給每個相機一個參考點,這些點相互獨立,因此如果在兩個相機之間能夠?qū)€原這些點的坐標,系統(tǒng)就能夠計算這些點的位置。確定這種對應關系需要用到高強度且復雜的算法。
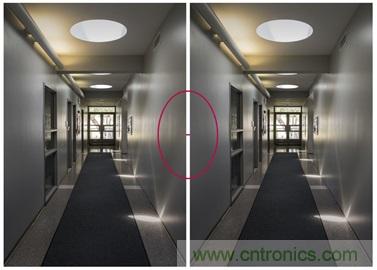
圖6. 使用立體視覺的3D深度測量
優(yōu)點
● 無需主動發(fā)光
● 它只需要使用兩個相機來獲取數(shù)據(jù),因此價格更便宜(雖然可能需要使用一個復雜的應用處理器來找到對應的點,并生成3D圖像)。
缺點
● 如果兩個相機之間的對應點沒有差別對比,則無法計算距離。對于白墻環(huán)境(因為兩個相機顯示的內(nèi)容之間沒有差異)和環(huán)境光不足的環(huán)境,這個問題就會凸顯出來。
● 距離更遠時,兩個相機彼此之間應該相距更遠,以便對應的點位于兩個相機的不同位置。對于需要測量更遠距離的應用,尺寸成為明顯的問題。
結(jié)構(gòu)光
結(jié)構(gòu)光的工作原理是將已知的參考點圖投射到三維物體上,參考點圖經(jīng)過物體高度調(diào)制產(chǎn)生變形,被調(diào)制的光信息被2D相機采集捕捉,然后將調(diào)制后的光信息與投射的參考點圖做對比,基于調(diào)制水平計算出深度圖。
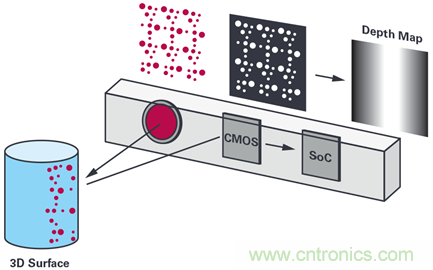
圖7. 使用結(jié)構(gòu)光方法的深度傳感圖解。
優(yōu)點
● 能夠在近距離內(nèi)(< 2米)實現(xiàn)非常高的空間分辨率和非常高的精度。
缺點
● 提取一幀信息需要多次投影,這可能會降低幀速率,導致從移動對象中提取距離信息變得非常困難。
● 對于遠距離探測,光源需要遠離相機鏡頭,因為如果光源距離鏡頭太近,可能導致無法識別圖像變形。對于需要小尺寸外形的應用,這可能不太合適。因此,當深度測量應用的距離大于2米時,一般不使用結(jié)構(gòu)光方法。
● 室外環(huán)境光也可能干擾圖像調(diào)制,所以結(jié)構(gòu)光更加適合在室內(nèi)使用。
ADI深度傳感(ToF)技術
ADI的ToF技術屬于脈沖ToF CCD系統(tǒng)(圖8),使用高性能ToF CCD和集成了12位ADC、深度處理器(將來自CCD的原始模擬圖像信號處理成深度/像素數(shù)據(jù)),以及高精度時鐘發(fā)生器(為CCD和激光器生成驅(qū)動時序)的TOF模擬處理前端ADDI9036。時序發(fā)生器的精確時序內(nèi)核支持在45 MHz時鐘頻率下按照大約174 ps分辨率調(diào)整時鐘和LD輸出。
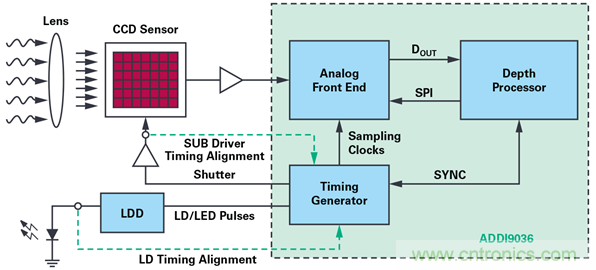
圖8. ADI ToF系統(tǒng)功能框圖。
與其他解決方案相比,ADI的ToF系統(tǒng)具備以下優(yōu)點
● 使用了分辨率為640×480的ToF圖像傳感器,其分辨率比市面上大部分其他ToF解決方案的分辨率高4倍。
● 使用了對940nm波長高度靈敏的傳感器。如之前所述,環(huán)境光將顯著降低反射信號的信噪比,特別是在強烈的環(huán)境光下。940nm激光器已經(jīng)變得很普遍,因為這種波長在太陽光光譜中占據(jù)了一席之地,在該光譜中,光子通量的幅度相對較低(圖9)。ADI ToF系統(tǒng)使用對940nm光敏感的ToF CCD,因此能夠在室外環(huán)境或具有強環(huán)境光的區(qū)域采集到更多的有效信號。
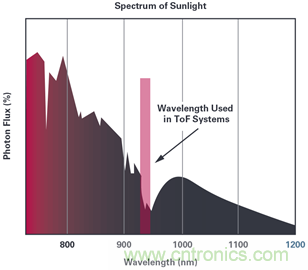
圖9. 光子通量與太陽光的波長。
深度處理器采用偽隨機化算法和特殊的圖像處理功能,可以消除多機干擾(如前所述)。因此,可以在同個環(huán)境中使用多個ADI的ToF系統(tǒng)。
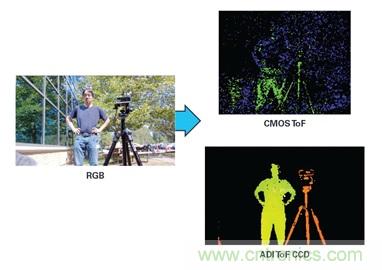
圖10. 戶外圖像的深度圖比較。
在圖10顯示的示例中,在戶外使用三個不同的深度測量系統(tǒng)來測量距離。值得注意的是,使用850 nm光源的CMOS ToF系統(tǒng)很難分辨出人與三腳架,而ADI的CCD ToF系統(tǒng)卻能夠清晰地分辨出兩者。
W哪些應用正在使用ToF技術?
如引言所述,在2D圖像中加入深度信息可以提取出更多的有效信息,從而顯著提高場景信息的質(zhì)量。例如,2D圖像檢測無法區(qū)分真人和照片。提取深度信息可以更好地區(qū)分人體,跟蹤面部和身體特征。ToF深度傳感可以提供高質(zhì)量且可靠的人臉識別方案,用于身份安全驗證。分辨率和深度精度越高,分類算法 的性能越好。它可以用于實現(xiàn)簡單功能,例如允許訪問移動設備/私人家庭空間,也可以實現(xiàn)高端應用,例如在商業(yè)敏感區(qū)域提供門禁控制。

圖11. 數(shù)字人臉識別。
隨著深度傳感技術的分辨率和深度精度不斷提高,人員的區(qū)分和跟蹤將變得更加容易。人工智能的使用可以大大提高分類的置信度,從而推動新的新興應用領域涌現(xiàn)。一個很好的例子是商業(yè)自動門開啟功能,尤其是在太陽光強烈的區(qū)域。確保門只對人開放,不對其他物體開放,這有助于實現(xiàn)高效樓宇管理,并提高安全性。

圖12. 自動門開啟的人員分類。
隨著3D算法進一步成熟,數(shù)據(jù)分析將被用來收集大量關于人們行為的有效信息。這種技術可能最先應用于樓宇控制應用,例如門禁系統(tǒng)。垂直安裝的傳感器增加了深度信息,這意味著可以非常準確地計算人數(shù)。另一個用例是智能自動門開啟(圖13),它可以對人進行區(qū)分,只有在檢測到真人時才開啟。ADI正在開發(fā)人員計數(shù)和區(qū)分的軟件算法。
通過使用深度信息,可以在許多具有挑戰(zhàn)性的條件下對人進行高精度的分類,例如在光線暗淡或沒有環(huán)境光的環(huán)境中,在人口密度較大的地區(qū),以及在人員著裝復雜的情況下(例如,戴著帽子、圍巾等)。最重要的是,幾乎可以消除人員計數(shù)錯誤。如今,立體攝像機可以用于進出檢測,但由于機械尺寸(兩個傳感器)和高處理器需求的限制,立體視覺往往價格昂貴,且尺寸很大。ADI ToF 技術直接輸出深度圖,且只采用一個傳感器,因此大大降低了外形尺寸和處理需求。
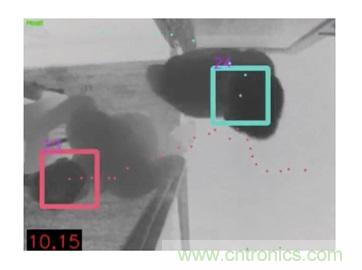
圖13. 使用深度傳感技術的人員跟蹤算法。
深度傳感是工業(yè)、制造和建筑過程中的重要應用。在整個生產(chǎn)過程中實時準確地確定尺寸并進行分類,這是一項了不起的功能。準確的深度傳感可以確定倉庫的使用率。需要能夠快速確定下線產(chǎn)品的尺寸,以進行傳輸。高分辨率深度傳感能夠?qū)崟r確定目標對象的邊緣和線條,并快速計算出其體積。這種確定體積的應用目前已使用神經(jīng)網(wǎng)絡方法。
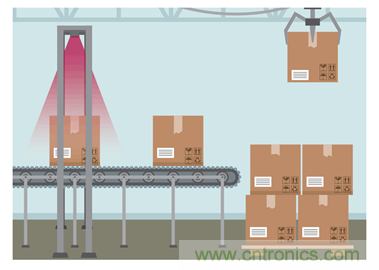
圖14. 3D尺寸。
在工廠內(nèi)部,自動傳輸產(chǎn)品的范圍不斷擴大。AGV(自動導航車輛)等自動駕駛車輛將需要在工廠和倉庫中更快地自主導航。高精度深度傳感技術使得傳感器能夠?qū)崟r繪制所處的環(huán)境、確定自身在地圖中的位置,然后找出最高效的導航路線。在工廠自動化環(huán)境中部署這種技術的最大挑戰(zhàn)之一在于:來自在同一 區(qū)域運行的其他傳感器的干擾。ADI的干擾消除IP使得這些傳感器能夠在彼此的視線范圍內(nèi)工作,且不互相影響性能。
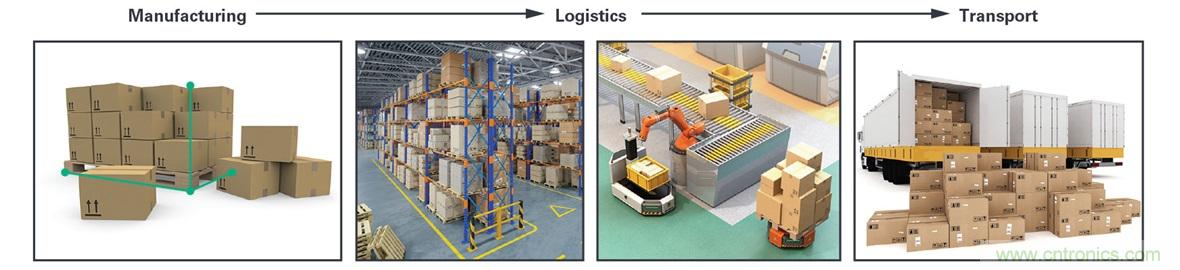
圖15.制造過程中的深度傳感用例。
如何使用ToF技術實施評估、原型制作和設計?
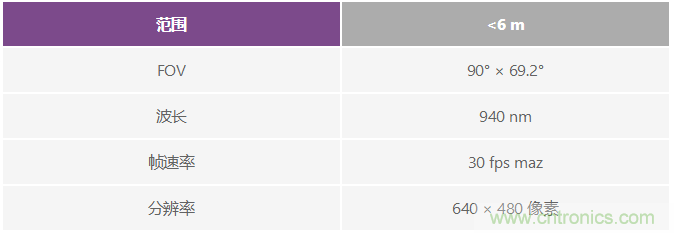
ADI開發(fā)了一個光學傳感器電路板 (AD-96TOF1-EBZ),與Arrow 96應 用處理器平臺兼容。關于這款96TOF1電路板的光學規(guī)格,請參 見表1。

圖16. ADI的96TOF光學深度測量電路板。
表1. ADI的96TOF光學電路板規(guī)格
該電路板可以直接連接到Arrow的96Boards系列產(chǎn)品。96Boards系列是一系列硬件處理器平臺,以合理的價格為開發(fā)人員提供基于 ARM®的最新處理器。按照96Boards規(guī)格生產(chǎn)的電路板適用于快速原型制作, Qualcomm® SnapdragonTM, 恩智浦和 NVIDIA® 處理器都支持96Boards平臺。
ToF深度傳感是一項復雜的技術。實現(xiàn)VGA傳感器的最高性能需要用到大量的光學專業(yè)知識。光學校準、高速脈沖時序模式、溫度漂移和補償都會影響深度精度。要實現(xiàn)所需的性能,可能需要花很長時間進行設計。雖然ADI可以提供含芯片的設計,為合格客戶提供機會,但許多客戶都在尋找能夠更輕松、更快速且更高效進入市場的方法。
許多客戶都對簡單的演示模塊感興趣,他們會先評估該項技術的性能,然后決定是否在實際項目中使用。ADI與多家硬件合作伙伴合作,提供不同等級的硬件產(chǎn)品。DCAM710演示模塊由我們其中一家硬件合作伙伴(Pico)提供,支持通過USB將深度圖像直接傳輸至PC。

圖17. DCAM710 VGA深度測量和RGB攝像機。
DCAM710模塊規(guī)格
ToF攝像機DCAM710模塊的規(guī)格:
● B基于ADI的ToF信號鏈產(chǎn)品和技術
● 可輸出深度圖和(710版)ToF + RGB圖像(可禁用)
● FOV 70 × 54
● 深度攝像機支持的圖像大?。?0 FPS下,最大640 × 480
● RGB攝像機支持的圖像大?。?0 FPS下,最大1920 × 1080
● USB 2.0接口
● 支持的操作系統(tǒng):可以在 Android®, Linux® 和 Windows® 7/8/10 上 運行
● Pico深度傳感器SDK、示例代碼和工具(兼容OpenNI SDK)
● Python®中ADI提供的示例應用算法
Pico SDK軟件平臺支持Windows和Linux操作系統(tǒng),支持多種軟件功能。點云可以在對象周圍的空間中生成一組數(shù)據(jù)點,通常用于生成3D模型(可以通過SDK輕松生成)。

圖18. 深度傳感點云。
由于演示平臺通過USB將原始數(shù)據(jù)傳輸?shù)接嬎銠C上,因此很容易開發(fā)簡單的軟件應用算法來幫助客戶快速開發(fā)代碼。
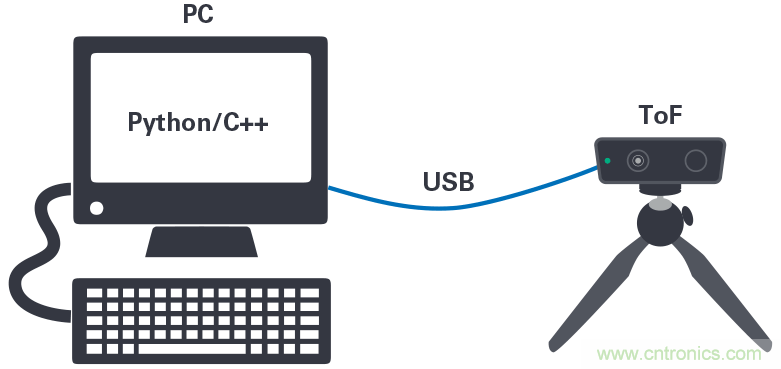
圖19. VGA深度傳感通過USB傳輸至PC。
ADI在Python中提供簡單的示例代碼,以支持客戶進行評估。下面的示例是實時截圖的Python源代碼,該代碼被用于檢測和分類人員,然后使用深度測量來確定人員與傳感器之間的關系。其他可用的算法包括終端檢測、對象跟蹤和3D安全幕。

圖20. 人員分類和范圍檢測。
如何利用ToF實現(xiàn)量產(chǎn)?
雖然ADI 96TOF參考設計對進行芯片化設計的客戶非常有用,DCAM710演示平臺仍是評估該技術的一種經(jīng)濟高效的方法,但在許多情況下,客戶進入量產(chǎn)時,會需要使用不同或自定義程度更高的解決方案。例如,在AGV系統(tǒng)中,通常需要終端節(jié)點感測模塊提供GigE或以太網(wǎng)輸出。這提供了一種將來自終端節(jié)點感測模塊的高速原始深度數(shù)據(jù)發(fā)送至集中化CPU/GPU控制器的可靠方法。
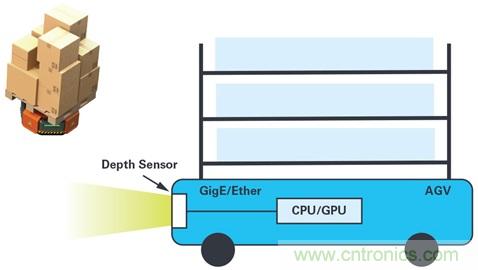
圖21. 工業(yè)AGV中的深度測量(導航/防撞)。
在其他應用中,客戶可能希望實現(xiàn)一些終端節(jié)點處理,但只將元數(shù)據(jù)發(fā)送回控制器。在這種情況下,就需要使用外形小巧的深度節(jié)點模塊,配備支持ARM或FPGA的集成式終端節(jié)點處理器。ADI已經(jīng)開發(fā)了大量第三方生態(tài)系統(tǒng)合作伙伴,可以滿足不同客戶的要求。
這些第三方提供一系列功能,從完整的攝像機產(chǎn)品到?jīng)]有外殼的小型光學模塊(可以集成到更大的系統(tǒng)中)。下圖所示為沒有外殼的微型MIPI模塊,可以輕松集成到更大的系統(tǒng)中。ADI的合作伙伴網(wǎng)絡還可以根據(jù)需要提供硬件、光學器件和應用處理器定制服務。我們的合作伙伴如今提供的模塊包括USB、以太網(wǎng)、Wi-Fi和MIPI,以及一系列集成式終端節(jié)點處理器。
ADI和我們的硬件合作伙伴還與外部軟件合作伙伴合作,后者提供系統(tǒng)級的深度處理算法專業(yè)知識。
結(jié)論
高分辨率深度成像系統(tǒng)可以幫助解決新興應用領域中的困難任務和復雜任務,這一優(yōu)點促使我們的客戶開始迅速采用該系統(tǒng)。想要以最快的速度、最低的風險、最便宜的方式進入市場,就需要采用經(jīng)濟高效、尺寸小巧、高度精準、可以集成到更大系統(tǒng)的模塊。ADI的96TOF參考設計平臺提供一個完整的嵌入式評估平臺,使得客戶能夠立即評估技術,并開始開發(fā)應用代碼。如需獲取有關ADI的ToF技術、硬件或我們的硬件合作伙伴的更多信息,請聯(lián)系ADI。
推薦閱讀:



